Stewards Platform
June 01, 2024
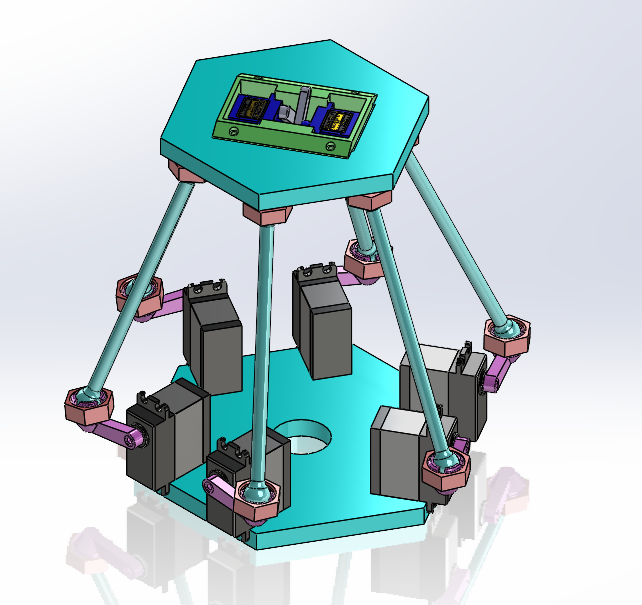
This project involved designing and implementing a stewards platform powered by Metal Gear Servos, utilizing kinematics and PID control for precise motion control.
Kinematics
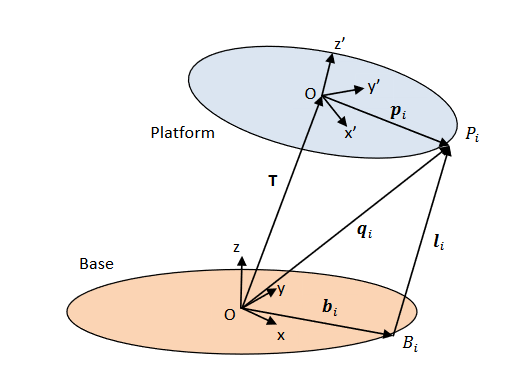
For this project, I am going to start with the kinematics, which will influence our design approach. I do this in a very similar way to how I did the Tripteron project, in the sense that we know where we want the position of the platform to be, so I start there, get each point attached to the top platform, and solve the inverse kinematics one by one while constraining it to be within the allowed parameters.
Workspace Analysis
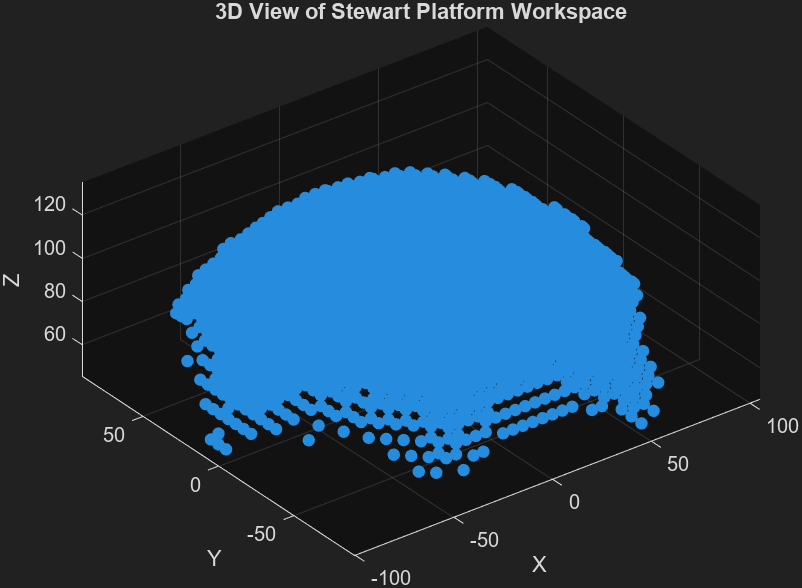
I used the equations to go through some ranges to see how much the robot could move and if it was a usable space. I put values from the rough CAD I created to visualize the robot (values are in mm). I then changed the lengths of the legs until I had an acceptable range. (also, for this simulation, the platform would remain horizontal to the floor for simplicity)
Design
Now that the joint geometry was finalized, I started to design the rest of the robot to what was reasonable. At first, I used spherical rod ends, but they provided limited motion because the joint only had about plus or minus 20 degrees of movement. So, I switched to these custom 3D-printed ball joints. The new joints gave me more freedom on where the pivot points would be.