My Projects
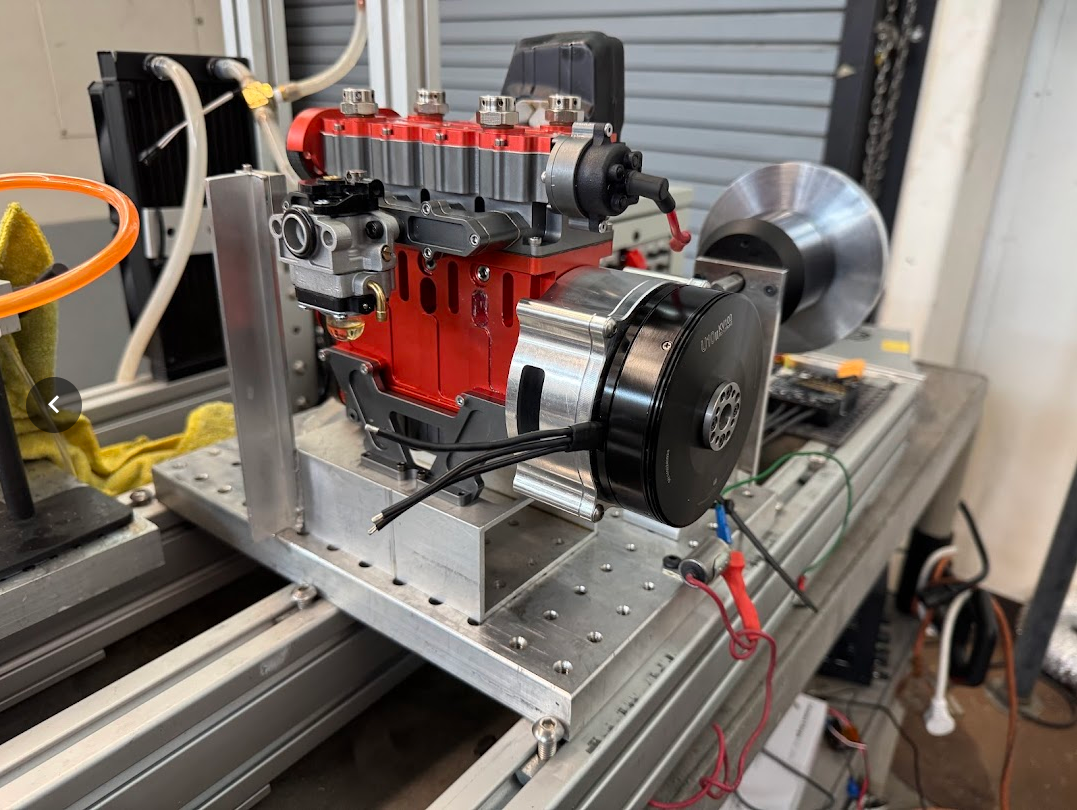
Hybrid System
Hybrid test platform pairing a small inline 4 engine with a brushless motor/generator, sensor network, embedded controller, and safety-focused state machine control.
Mechanical Design
Brushless Motor
Controls
Embedded Systems
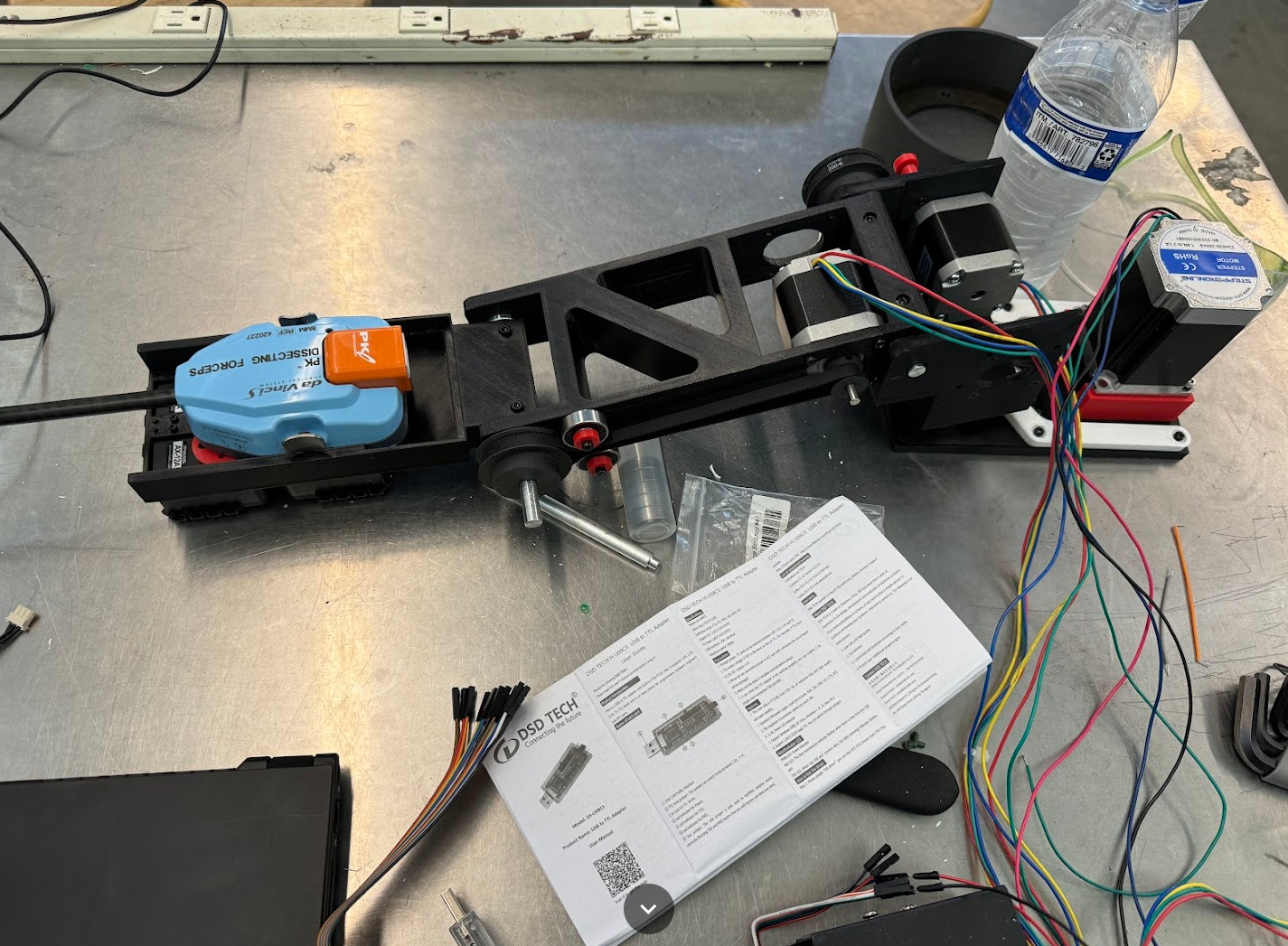
8 DOF Robot (Da Vinci Replica Attempt)
Placeholder for an 8 DOF robot inspired by Da Vinci-style robotic systems, focused on precision mechanisms, cable-driven motion, and teleoperated control.
Robotics
Mechanical Design
Teleoperation
Controls

PILLARS
PILLARS is a Plume Deployed Inflatable for Launch/Landing Abrasive Regolith Shielding and a finalist of the 2024 BIG Idea Challenge.
NASA BIG Idea Challenge
Robotics
Mechanical Design
Lunar Systems

Brinson Weather Balloon
Weather balloon payload concept using FPV cameras and an RF video system to continuously beam live footage from the balloon during flight.
SolidWorks
RF
FPV
Embedded Systems
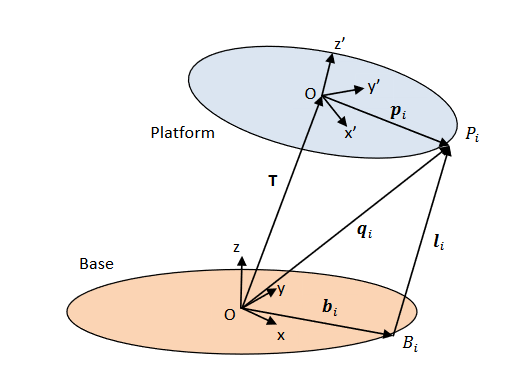
Stewards Platform
This project involved designing and implementing a stewards platform powered by Metal Gear Servos, utilizing kinematics and PID control for precise motion control.
Matlab
Simulink
Kinematics
3D Printing
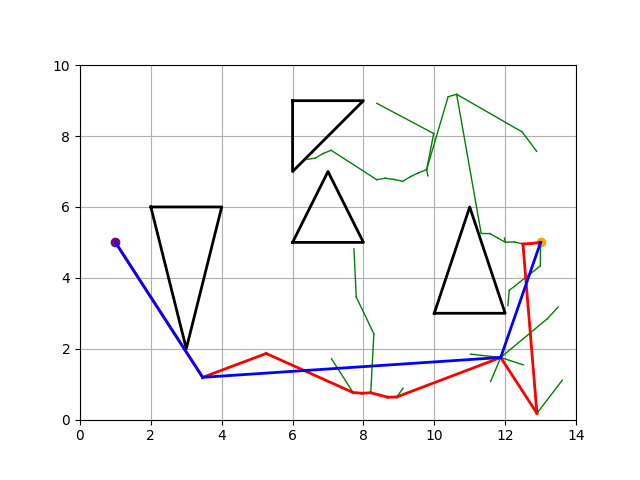
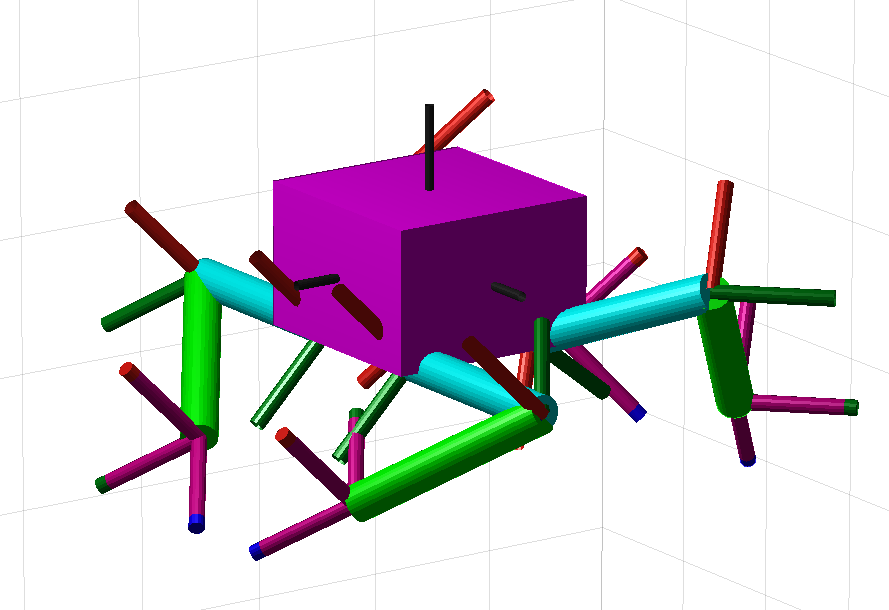
Motion Planning (RRT and EST)
This project involved an in-depth exploration of motion planning algorithms, focusing on Rapidly-exploring Random Trees (RRT) and Expansive Space Trees (EST). Through simulations and implementation, I gained a deep understanding of how these algorithms solve complex pathfinding problems in high-dimensional spaces.
ROS2
Python
Tripteron
The Tripteron is a 3-axis parallel motion robot, similar in concept to a delta robot, but with all three input motions configured to be parallel to each other. This "Parallel Axis Tripteron" design leverages a simplified yet efficient kinematic structure for precise movement.
ROS2
Matlab
Wolfram
Control Sims
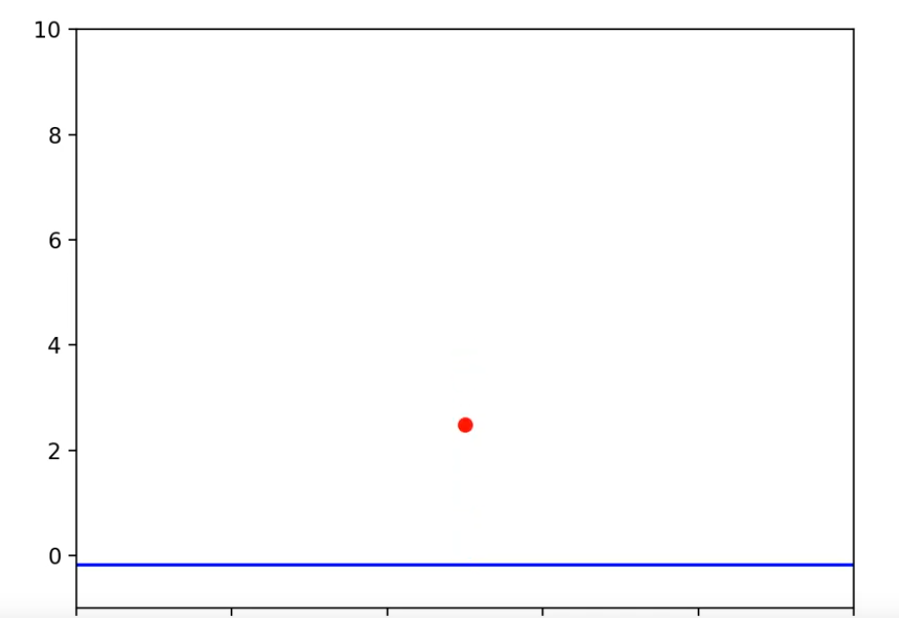
Explore dynamic systems through simulations like a 1D Bouncing Ball, showcasing collision dynamics and energy transfer, and a Passive Walker, demonstrating natural stability and energy-efficient locomotion. These foundational models highlight principles of physics-based control and motion.
Matlab
Python
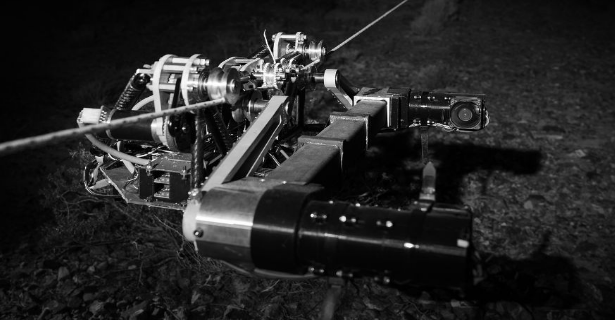
Lunar Architecture for Tree Traversal in-service-of Cable Exploration
LATTICE is a cable-based infrastructure that will enable robotic transport into and out of craters on the Moon. LATTICE targets implementation as the Moon’s first scalable robotic infrastructure.
Arduino
Machining
C++
RF
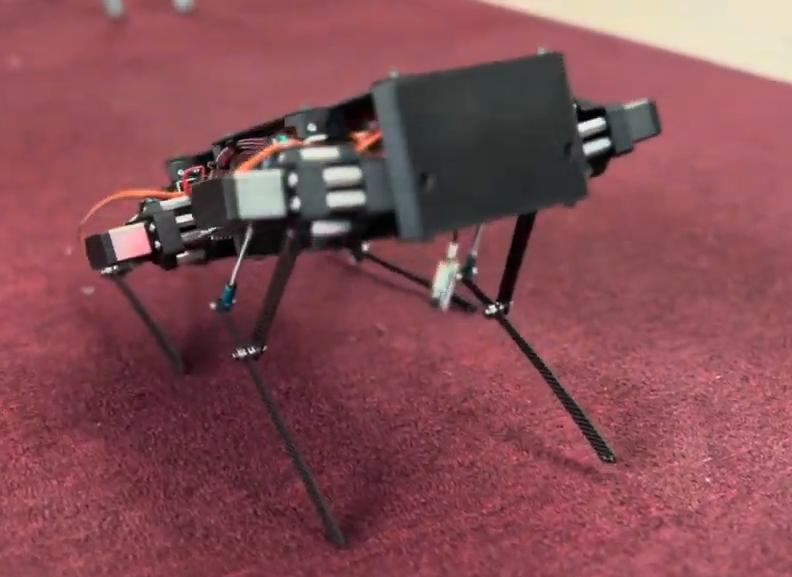
Pupper: Robot Dog
Developed a quadruped robot heavily inspired by the Stanford model, featuring kinematics, control algorithms, and Python-based simulation and implementation.
Python
Control algorithms
Kinematics
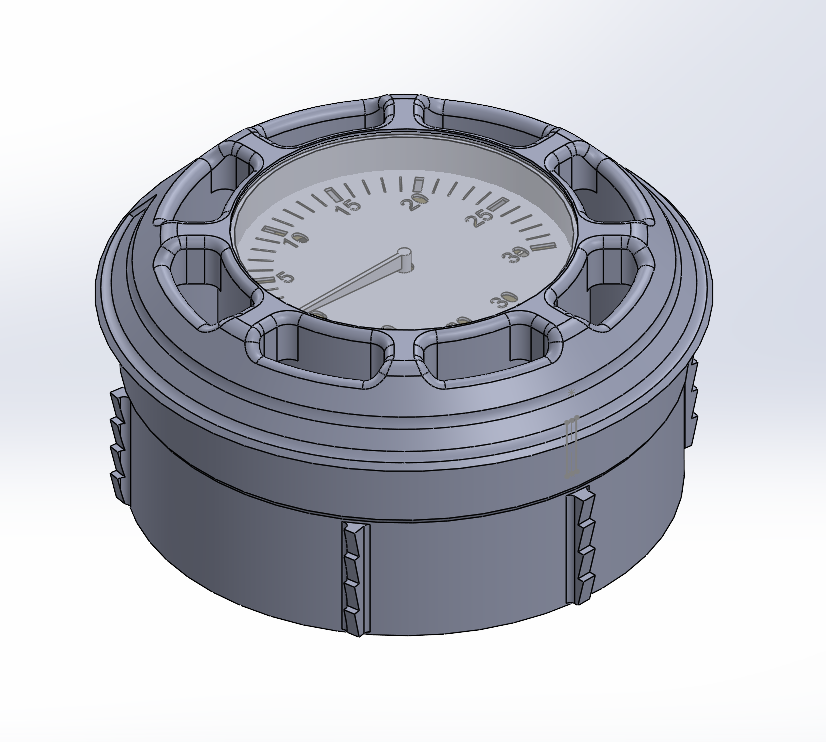
Boost Gauge
Designed and implemented a boost gauge for real-time monitoring of turbocharger performance in a car. The system accurately measures and displays manifold pressure, enhancing vehicle diagnostics and performance tuning.
SolidWorks
Arduino
PCB