Tripteron
November 01, 2023
The Tripteron is a 3-axis parallel motion robot, similar in concept to a delta robot, but with all three input motions configured to be parallel to each other. This "Parallel Axis Tripteron" design leverages a simplified yet efficient kinematic structure for precise movement.
Tripteron Model
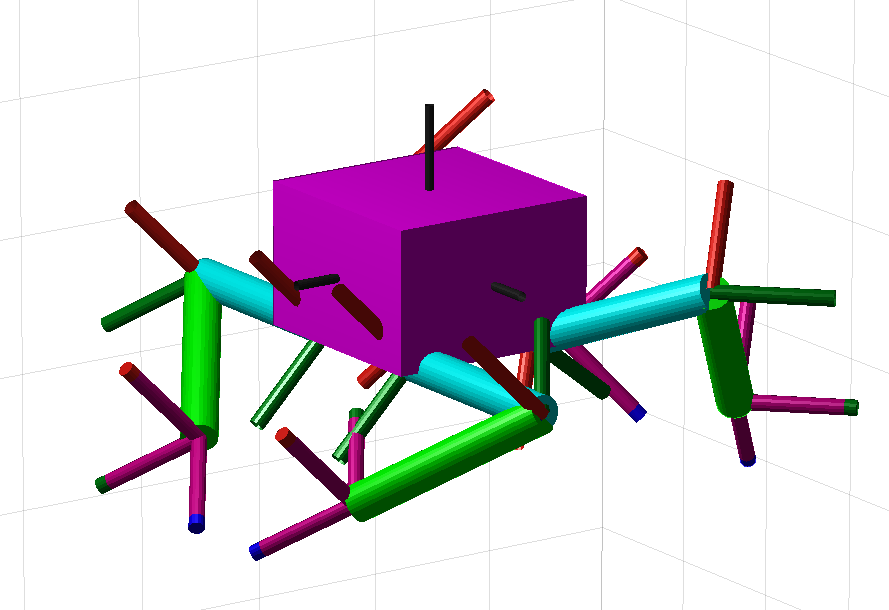
For this project, I started by making a URDF model of the robot using Matlab. I only made the URDF of the body even though I can only control the feet of the robot for visualization. In reality, we approach the math in another way.
Math Implementation
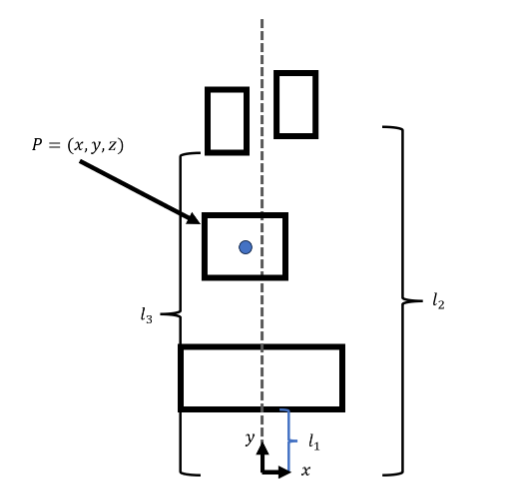
We approach the math by solving the inverse kinematics of the robot. Since we know where we want the platform of the robot to end up and since the platform is always level this simplifies the problem a lot. We can establish a relationship between slider positions and the platform to get a constant transformation matrix. From there we can manipulate the forward kinematic equations turning them into a system of equations to get the inverse kinematics. And we use these in ROS2 program to simulate the motion.